
4月18日,集度正式发布首款汽车机器人概念车车头部位的设计细节,其首创的车前盖、前向双激光雷达自动驾驶技术方案首次曝光。据悉,这是业内首次有乘用车公司,在自动驾驶方面采用 “纯视觉方案和激光雷达融合方案”双独立系统的高阶系统冗余方案。
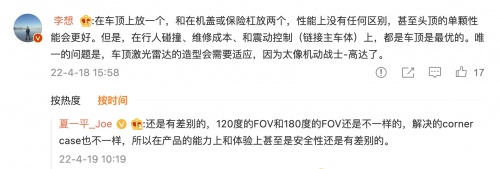
集度独特的自动驾驶路线得到了多方业内人士的关注。在某知名行业媒体的评论区中,理想汽车CEO李想对集度的激光雷达设计直言“(车头双雷达)性能和车顶单颗雷达没区别”,此话一出,一众网友纷纷从技术和外观方面表达了对李想言论的不同意见。而集度CEO夏一平也亲自下场,从技术的视角,介绍了集度双雷达方案的高体验感和高安全性。
双方各有立场属于正常讨论,但智能车“长犄角”(激光雷达头顶方案)和“做眼睛”(集度激光雷达车头方案)的问题,为什么能同时引起网友以及两位业界大佬的亲自辩论?
视觉路线VS激光雷达:激光雷达为什么迎来上车潮?
首先,是激光雷达越来越重要。
长期以来,关于自动驾驶“纯视觉感知”和“激光雷达”两种路线就伴随着自动驾驶技术的成长而不断丰富。现在,随着纯视觉感知方案的不断进步,纯视觉感知方案已成为最适合量产的自动驾驶方案,不仅有特斯拉、丰田不断加码,百度Apollo Lite更是仅凭纯视觉感知就能实现城市域L4级自动驾驶的能力,集度更在今年 1 月份就已在其 SIMUCar(软件集成模拟样车)上融通了高速、城市双域的多场景自动驾驶功能,提前验证了量产高阶自动驾驶能力的安全稳定性。
目前,纯视觉方案在极端天气下会受到影响,而激光雷达可以补充纯视觉感知不足的部分,因此近年来,激光雷达在高端智能车迎来“上车潮”。集度为了自动驾驶的安全性,提出的“纯视觉路线、配装激光雷达提供硬件安全冗余”似乎成为目前阶段下实现自动驾驶量产的最优答案。
也就是说,纯视觉方案的不断进步,让量产自动驾驶的进程不断加速,反而推动了激光雷达的量产装载以提高车辆的安全冗余,这不是黑色幽默,只是一种产业发展的必然规律。
“做犄角”VS“做眼睛”深度辨析:为什么车头双激光雷达更安全?
另一方面,是激光雷达的位置,对车辆安全变得越来越重要。
具体到产业实践,我们不妨以李想与夏一平两位智能车大佬的争论为例具体论证。
从安全角度而言,与李想表示的“在车顶上放一个,和在机盖或保险杠放两个,性能上没有任何区别,甚至头顶的单颗性能会更好”不同,夏一平和网友的反击观点无疑直击要害:
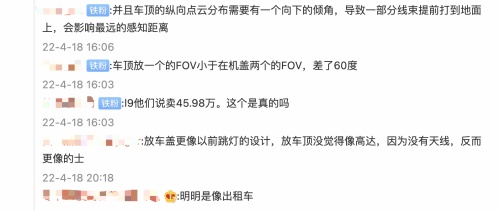
首先,车顶单颗激光雷达只能带来120°的视角FOV,而集度的车头双雷达的视角FOV则可达到180°,不仅解决的corner case不一样,产品的自动驾驶能力、体验上甚至是安全性都会有差别。(视角FOV即fieldofview,是指镜头所能覆盖的范围,物体超过这个角就不会被收在镜头里,我想所有体验过3D电子游戏的人,都会知道视角差异会带来多大影响)
其次,车顶激光雷达的纵向点云分布需要有一个向下的倾角,导致一部分线束提前打到地面上,会影响最远的感知距离,这也将深度影响车辆的感知能力。
最后,是智能车时代的设计理念问题。集度的车头激光雷达位置不仅在法规允许的范围内,更体现了集度真正打破传统汽车设计理念的创新之处:区别于传统燃油车将前机盖划为动力总成集合区的传统做法,电动智能车在此区域的功能性更小,因此设计空间更大,这也是新能源“带头大哥”特斯拉在Model X和Model3置前备箱的直接原因。
集度将激光雷达放置在车头,其实反而是对智能车理解更深的体现。李想对前机盖位置激光雷达的判断,很可能是对智能车设计的理解问题。

激光雷达放置方案分析:“车头双激光雷达”何以成为豪华智能车越级配置?
事实上,纵观旗舰级、甚至是豪华级智能车,与集度类似的双激光雷达方案,已经成为高端智能车的产业趋势。
路特斯在近日发布的百万级纯电HYPER SUV车型EletreEletre,就选择在前挡风玻璃顶部、以及两侧的前轮拱安装了伸缩式激光雷达;而华为 ADS ,也在车头两侧布局了激光雷达,以便“更符合车的形态”,更好的应对 CUT IN (插队)场景。可以说,不管是百万级智能车、还是自动驾驶量产的一众领导者,都选择了与集度相似的方案。

在审美角度,车顶激光雷达方案还未被大众接受。即使蔚来et7选择了车顶式激光雷达,蔚来CEO李斌也只能解释为:“合理就是美”,而不谈“造型美”与“设计美”。理想即将发布的新车L9,也采用了“头顶单颗激光雷达”的设计方案。
集度则大有不同。作为自动驾驶激光雷达路线的产业领袖,集度背后的百度已经有多年的激光雷达大规模实践应用:截至目前,百度Apollo L4级自动驾驶路测超过2500万公里,是搭载大量激光雷达的Robotaxi无数记录的保持者且,大幅领先于其它企业。可以不客气地说,论起对激光雷达自动驾驶路线的实际认知,百度如果称第二,在国内应该没有人有底气称第一。
最后的话:
产业领域的争论,最后还是要让市场解答。即使产业领袖们有再多的不同意见,我们也只能选择“让子弹再飞一会”。
然而,在正确的路上遇到争论时,也许叔本华的那句“所有的真理都要经过三个阶段:首先 ,受到嘲笑;然后,遭到激烈反对 ;最后,被理所当然地接受”就是最好的答案。
(免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。 )




















