
如果你翻开那本汇聚各个机器人界大牛研究成果的《Springer Handbook of Robotics》,你会发现里面有一节讲机器人系统架构,ROS就是机器人系统架构的经典例子之一。

ROS作为机器人软件平台,能为异质计算机集群提供类似操作系统的功能。对于新手或学生党来说,ROS 的学习难度较低,适合入门。对于做产品的公司或者开发者来说,ROS 能够快速做些 Demo进行验证试错,成本低效果好。因此,国内外众多机器人学习者、科研、开发人员都通过ROS系统搭建机器人。

今天,小岚给大家介绍一款ROS机器人— TARKBOT系列麦克纳姆轮款,这是一款可实现SLAM建图导航,深度相机三维建图导航,沙盘自动驾驶、自动跟随等功能的ROS机器人,满足开发和验证需要。
这款TARKBOT ROS机器人搭载了思岚科技的RPLIDAR A1雷达。
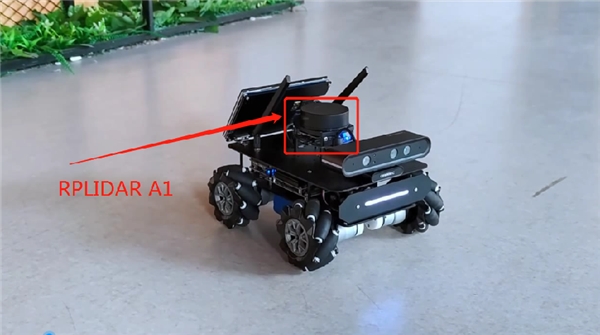
RPLIDAR A1激光雷达的应用,让ROS机器人可以探测周围物体的形状和环境,结合SLAM算法和视觉传感器,帮助ROS机器人实现激光雷达SLAM地图构建,帮助后续定位导航、避障 。
# SLAM建图 #
RPLIDAR A1的测距核心顺时针旋转,可实现对周围环境360度全方位的扫描测距检测,从而获得周围环境的轮廓图。
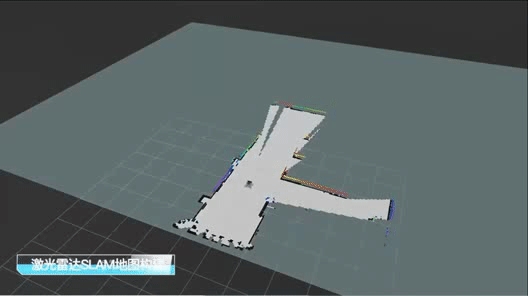
▲ROS机器人使用激光雷达建图
并且,RPLIDAR A1通过激光三角测距技术,配合自主研发的高速的视觉采集处理机构,可以进行每秒8000次以上的测距动作,可以帮助机器人更快速、精确建图。
# 结合算法实现避障、导航 #
RPLIDAR A1通过不断旋转并发射激光,接受激光返回,测算出障碍物的距离和形状。结合视觉传感器和ROS算法,就可以帮助机器人在移动中识别不同标识,在遇到障碍物时快速做出避让反应。
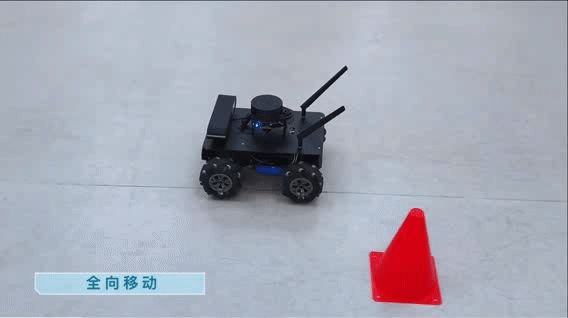
▲ROS机器人避障移动
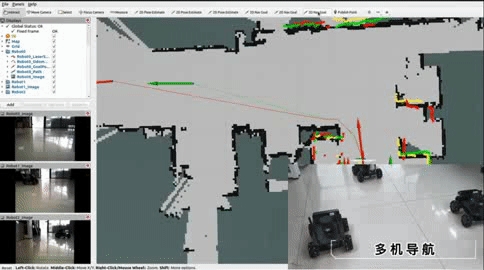
▲ROS机器人多机导航
RPLIDAR A1 8000次/秒的采样频率,让机器人能更快速、精确的建图,不管是从成本选择还是性能选择,RPLIDARA1都是目前教育和研究客户的第一选择。
# 物体跟随#
除了建图和导航之外,TAKABOT 搭载了 RPLIDAR A1,还可以让ROS机器人实现物体跟随功能。激光雷达获取了物体位置和距离信息后,结合机器视觉算法提取识别物体特征,如宽度和高度等信息,实现跟随功能。

▲ 利用雷达实现跟随功能
目前,思岚所有的激光雷达产品都兼容ROS系统,也是ROS官方认证的国内唯一一家激光雷达传感器产品。思岚RPLIDAR系列雷达也一直在迭代升级并且已经大量应用于各大场景下的智能机器人中,经过多年技术积累,适应的应用场景更多,性能也更加稳定,真正做到了高性价比、高稳定性。
(免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。 )




















